As hinted in my last blog article, for us to really be able to move forward we needed to do some experimentation with the new technologies we have to adapt. The primary candidate in the beginning of that phase was WiFi Direct, a type of WiFi mode setting which is an official standard published by the WiFi consortium which is meant to replace the ad-hoc wifi mode. But only partially: WiFi Direct was mostly designed to make integration with IoT products easier. As such, using it for the meshing applications is a bit outside of it’s primary use case. The idea behind it is to make two WiFi devices talk to each other without needing a router to be the middleman for negotiation and frequency selection. Even groups of devices are possible create, electing a group leader that then manages the group.
Unfortunately…that sounded a lot better in theory than it turned out to be in practice.
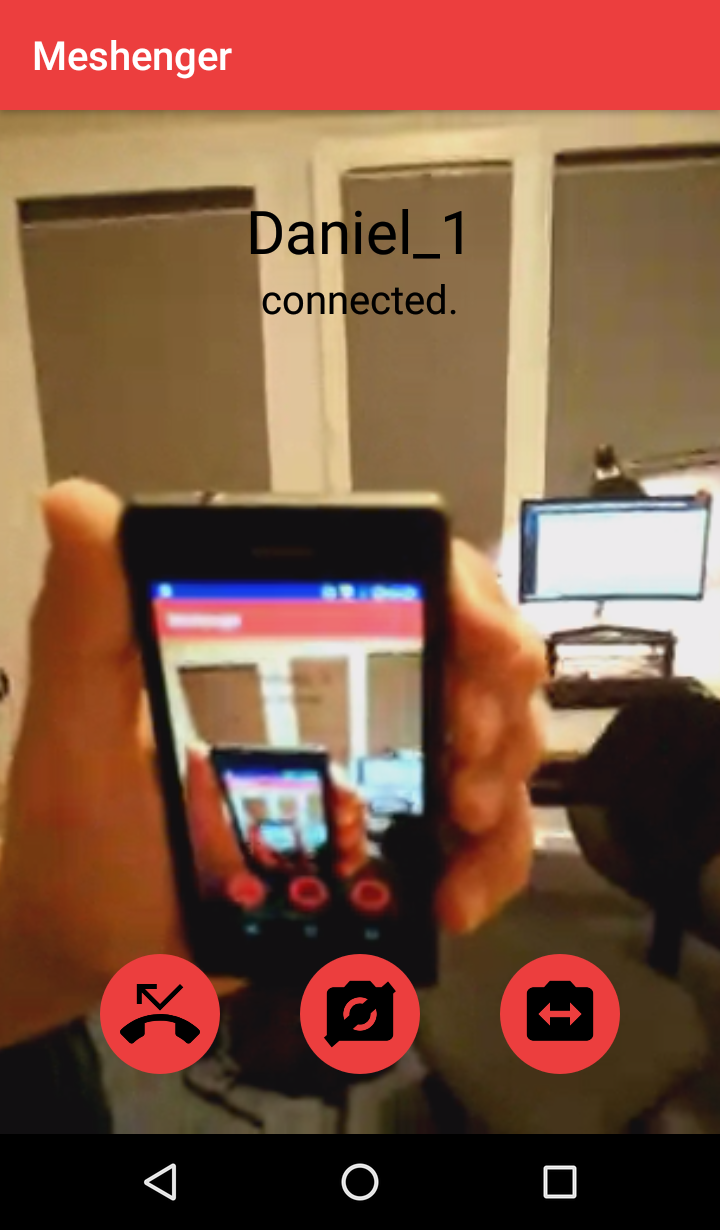
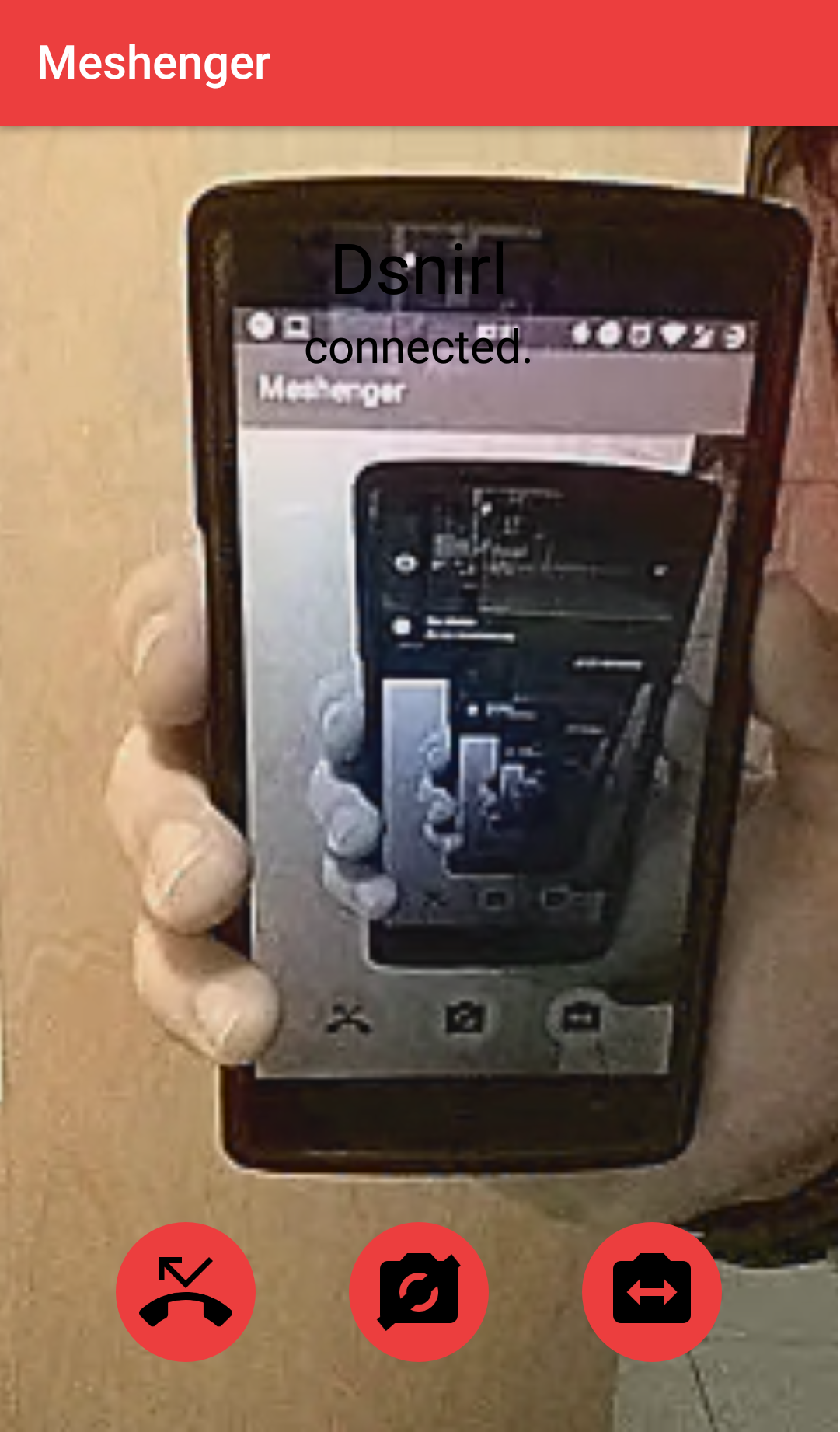
Also as hinted in my last blog post we built some little prototype applications to test WiFi direct between multiple devices and ran into some issues. The APIs that are provided by Android are okay to use, but not super convenient. But most of the issues come from bugs that we haven’t exactly been able to trace down yet. The system WiFi Direct interface (System Settings > WiFi > Advanced > WiFi Direct) detects all devices in the vicinity whereas our application, using the WiFi Direct interface in the Android SDK would sometimes (nondeterministically) fail to detect devices or open sessions between them. We also had some bad experience creating groups between the devices.
All in all…it was underwhelming. WiFi Direct really wasn’t meant to do the kind of networking we’re trying to do with it and even if we can figure out the bugs we encountered, there are other concerns to work out. Debugging these issues aren’t easy but there are a few things we can do. For one, there are other (open source) applications that exist (serbal, briar, …) that use this technology and we can study to see how they solved these issues. There is also the option of wireshark-ing packets that are being transmitted between the two devices to get a better understanding of where handshakes are going wrong. Simple debugging via Android/ Java debugger unfortunately hasn’t yielded many useful results.
We need a convenient way for people to be able to join the network. We need to figure out a way to create a captive portal for people just connecting without the software. The handoff between a WiFi Direct network section and a legacy ad-hoc section that might be created between infrastructure nodes that don’t support WiFi Direct. The last week or so I’ve had my head in the WiFi Direct specification, trying to answer these questions. And while I think we have solved most problems, there’s still a few left to answer.
The second technology we are investigating to complement WiFi Direct wherever it isn’t applicable is Bluetooth P2P Meshing. In contrast to WiFi Direct, it was actually developed for devices to mesh with each other which makes the adaptation of it easier for us in the long run. So far we’ve only done some simple experiments with 2 devices (due to a lack of Android devices in one location 😉 ) but these have been a lot more promising than what WiFi Direct has offered.
The biggest take-away from the last 2 weeks of experimentation is that we can’t dedicate the routing core to a single networking backend.
In the design of the actual code interface that I’ve built in the first few weeks of GSoC this means that there are some adjustments to be made before writing more code. This includes being more generic when binding interfaces and allowing a client to use multiple backends at the same time. This was not intended to be used in the initial design. But for the time being those interfaces will simply be mocked by some stub methods or maybe a simple simulation so we can test the actual routing algorithms. This is an interesting challenge because so many parts of qaul.net will have to change in lockstep with each other to make it all work.
There are some corner cases to test when it comes to bluetooth mesh networking such as groups and how they handle devices joining in and out of them