This is the first update on the GSoC 2021- Retroshare Mobile App Project.
Recap :
The goal of the first project was:
Upgrading the project with new statemangement tool.
Adding short invite and QR code invite feature.
Adding import account functionality.
Upgrading the project with new version of flutter.
Adding support of createSigned Identity, deleteIdentity and UpdateIdentity feature.
Improving the UI of Add friend Screen.
Fixing minor bugs.
Adding support of retroshare-service inside the app.
Adding Emoji support.
Refactor codes.
Achievements :
I have almost added all the features to the app that I was proposed in my proposal for the first half. Currently, I am working on improving the chat backend.
As a next part of my work, I want to start with a client capacity measurement.
I want to find out how many of my Wifi clients support the different standards like 802. 11v / 802. 11k / 802. 11r etc. Since the access points know which features the clients have, I just have to be able to read out this data.
The heart of the Accesspoint is the interconnect system uBus which is used by most services running on an OpenWrt setup. UBus works as a message bus between different daemons in OpenWrt. The user space daemon software hostapd ensures that the network interface card functions as an access point. Furthermore, the OLSR protocol is installed on the Accesspoint to always ensure the shortest route between the individual Accesspoints.
To find out which clients support which standard I will write a new LUA script and install it on a virtual machine. This script is used to ask the hostapd via uBus for the clients that support 802. 11v. Since I want to evaluate the data and also want to display this graphically, I will install the Prometheus Exporter as monitoring software.
After I have evaluated the collected data with Prometheus, I can start the further implementation of the 802. 11v standard within the network.
Hey community 👋 This is the first update on the GSoC 2021-Freifunk Digital Twin Project.
Recap
The goals for the first phase were:
determine a management tool for 100+ VM´s and OpenWrt Devices
figure out how to fetch and prepare topology information from routing daemons
So let´s see how that went…
Achievements
After testing and playing around with Qemu, the next step was to find a suitable VM-Management tool that is able to manage 100+ VMs. After several hours of reading and testing, i finally chose libvirt, because it´s open source, lightweight and CLI-controllable. But because it´s so extensive, i needed plenty of time to read in an get up a proper OpenWRT-VM but now it works quite well. After that, we decided to migrate our test environment from my local computer to our lab-server, which is more powerful. After some technical issues, which cost us plenty of time, the environment was finally up an running and it is now able to start and host 100+ OpenWRT VMs. Because of the stated problems, i doesn´t have much to show to you at the moment, so i´m going to update this post in the next few days.
Next steps
figure out how to fetch and prepare topology information from routing daemons
Write a script that combines VM management and network management
See you in the next few days with a new update post. ✌️
Hi! I’m Tomás. This post is a brief of the work that we did in the last few weeks. The prototype of a network capability app was achieved, and we’re starting to test it on communities. The app is still a prototype: it has only three functions (connect to a webpage using the WiFi, check if you’re in a LibreMesh network, and check the private IP of the device) and the front-end consists of only these three buttons, but it has now all the logic that was needed to start working on the rest of the app.
Basic functions
The first approach was to check if the user was able to connect to the LibreMesh local address by checking it with a ping, and then we decided to move forward to an HTTP GET instead. With this idea in mind, we prepared a new version of the application that sends a command to the device (a curl command) instead of a Java method with a previously developed android interface (for the ping version).
public boolean httpGetToLibreMesh() throws InterruptedException, IOException {
//FIXME: modificar google por la IP de LibreMesh
String[] cmdLine = {"sh", "-c", "curl --head --silent --fail google.com"};
Process p1 = java.lang.Runtime.getRuntime().exec(cmdLine);
int returnVal = p1.waitFor();
return returnVal == 0;
}
This simple code solves the problem. It returns true if the HTTP GET to google.com worked, and false if it didn’t. It can be easily modified with the LibreMesh IP Address.
The next objective was to inform the user if the device wasn’t connected to the WiFi. In order to do so, we have to get the WifiManager from the ApplicationContext, and then check if the wifi is working.
Then, we needed a web navigator (WebView) inside the app with the capability to run the LibreMesh router website (On the first approach, to a google.com website).
Using a WebView object with the shouldOverrideUrlLoading overridden we can show a webpage in the app without the requirement of showing an external navigator (Android provides the Android WebView App that does this inside the LibreMesh app).
So with this simple code, we can configure the WebView to enter to a site inside the app.
Choosing through which network interface to send data to
Once having the WebView, the next step was to control through which network interface the application sends the network requests. In order to do that we have to access the ConnectivityManager. It was created as a class variable and defined on the function “onCreate” of the activity that holds the WebView. The connectivityMaganer isn’t a new instance but a reference to the object that controls the connections in the context of the App.
Then we needed a function that can request to use the WiFi. The idea is to make a NetworkRequest and send it to the connectivityManager, but it also needed a NetworkCallback to specify what to do when the Network was available to accomplish the request. So as a second parameter of the request there’s an anonymous class that overrides the methods needed.
@RequiresApi(api = Build.VERSION_CODES.LOLLIPOP)
private void requestWifi() {
final NetworkRequest networkRequest = new NetworkRequest.Builder()
.addTransportType(NetworkCapabilities.TRANSPORT_WIFI)
.build();
connectivityManager.requestNetwork(networkRequest, new ConnectivityManager.NetworkCallback() {
@Override
public void onAvailable(Network network) {
if(Build.VERSION.SDK_INT >= Build.VERSION_CODES.M)
connectivityManager.bindProcessToNetwork(network);
else
ConnectivityManager.setProcessDefaultNetwork(network);
}
@Override
public void onLost(Network network) {
if(Build.VERSION.SDK_INT >= Build.VERSION_CODES.M)
connectivityManager.bindProcessToNetwork(null);
else
ConnectivityManager.setProcessDefaultNetwork(null);
}
@Override
public void onUnavailable() {
super.onUnavailable();
}
});
}
The last thing that I needed to do was a function that runs the WebView.
The next step was to move forward with getting the LibreMesh IP address. On the other hand, that’s not more than just an algorithm or a gateway, either way, does the same results. This can give us an alternative way to see if the user is connected or not to the LibreMesh server (we get the IP through the algorithm and compare the gateway version).
The idea was pretty simple and only required a int to ip auxiliar function. So we decided to collect all the methods that returned wifi information and send them to a new WifiInformationManager class. So, this class sends all the information that we need from the WiFi:
The function getGateway solves in an elegant way the problem of the LibreMesh Local-Address. The rest of the job was simply to change the address of the WebView to this one.
Using logcat to find bugs
The logic step then was to try the application and test if it worked okay, but when we did that the WebView that shows the Lime-App showed a white screen instead. Using the logcat inside the Android Studio we were able to easily find the error, showing the importance of using this type of debugging tools.
Using the logs it’s easy to see that there’s a TypeError when trying to get the property ‘getVoices’. The problem comes with the plugin ‘window.speechSynthesis’ that isn’t available for some browsers.
The Lime-App is the graphical interface that LibreMesh uses for the configuration of community networks. We found the .js that was calling the function:
let synth = window.speechSynthesis; let voices = synth.getVoices();
It can be seen that in the line 2 the variable voices is set to a synth.getVoices, but if synth is undefined, then that line will not succeed. The solution was pretty simple, with a control structure we check if the speechSynthesis was available or not. So the fixed code is:
Hello! Good to see you here : ) This blog is mostly a summary of work done till now under the first coding phase of summer of code of ’21. Picking from the end of previous blog post, we planned implementing chat feature in the application module, but due to the aforementioned massive refactor in the entire codebase and upgradation of existing modules to support modern hardware the chat API has been deprecated, and some components, because of not being part of CI, got broken : ( To implement features in the module the very first step was to get the project build properly, previously (maybe) due to migration from different version control system to GitLab and that massive refactor there were some unidentified problems that did not let the application codebase build properly, also the main lead of the picture `android-support` crate, not being a part of our GitLab CI workspace too, wasbroken. We fixed all this entire stuff in multiple different steps, each solving a mini problem and writing CI for each missing component so that we or anyone joining the project never encounter similar problem(s) in the future.
I. Fixing the Android Application Codebase
The application codebase was considerably broken and for the very first time when I built the application, it instantly said build failed in10ms, which is really very weird as when for the very first time you build an android application, it takes noticeable time(~6 minutes), this time is for fetching the dependencies that are declared in the dependency management file of android codebase(the ones with the build.gradle name) followed by compiling the android project codebase. It was quite astonishing at first sight,but on closer look to the files present in the android codebase the cause was observable. It was the presence of dependency archives in the android codebase and their corresponding XML files too, and since these dependencies were already present, studio didn’t take the pain of fetching them from maven. So the question arises, When the dependencies were already present still then application didn’t compile, why? Actually what happens is that these dependencies’ XML files are editable so even the slightest edit in them renders them useless and studio doesn’t even report any kind of problem with them, another thing that happens under the hood is that studio stores these dependencies in its local cache so that when user re-compiles the application, no time is taken in fetching the dependencies and it can perform the real build. Also, by time these caches get corrupted and usage of very old cache does not let the project work in the way it should. Okay, now let’s come to the point how we fixed it. As by now it should’ve been clear that the problem was the existence of binaries and XMLs of dependencies present in the android codebase, so the solution that I anticipated was the deletion of these files. It was not sufficient. After doing this dependency management did go as expected, but still the build failed : ( After some more inspection, I found there was some problem with gradle executable scripts as well and the gradle-wrapper.properties too. So I just referred these scripts from my previous working projects and it finally started working, a moment of joy 🥳, after many days + nights of pain ; ) As this problem was fixed, after working on some other crucial matter(see next section, II one), we wrote a CI pipeline specially for our android application codebase so that it doesn’t break again ever in the mainstream. The android-application pipeline comprises of the 3 stages, in which its lint is checked, followed by build and then the tests are run. In the upcoming coding phase we plan to make this CI pipeline even more robust and enforce stricter formatting rules, introduce Static Analysis and run android Integration Tests on GitLab CI, well we’ll discuss it the next time we meet, leaving some topics for then 👀 You can find the corresponding MRs here: * Fixing the android application codebase: we/irdest/!21 * CI for android application codebase: we/irdest/!23
II. Fixing the FFI Layer
After the previously mentioned refactor, everything was working fine, only android specific components of the codebase were broken. A part of which, was our FFI layer, the android-support crate. This layer still held references of several deleted and deprecated APIs, therefore compiling this crate too gave a bunch of errors. Fixing them took much more time as this crate was written in Rust and then I was not that fluent with it. So fixing it included updating/modifying existing functions or we had to remove functions as well because of the deprecations. A nice challenge that we encountered was saving the state across multiple platforms(supported hardware), because the crate we used for saving state provided support for almost all the operating systems other than Android. So what we did was using the knowledge of android that an application has access to its own private storage which no other application/service can see, so all we needed to do now was to find this directory in android device file-system, this path we achieved using the ADB, now we investigated where our crate went wrong, so for this we dived deep into the crate’s API and read how it achieved similar behavior for other platforms, which was that, it first of all found the HOME(environment variable) for the OS and then located corresponding path(s) for saving state in dir/file(s), turned out, that the crate was identifying HOME wrong only for android file-system. After this was diagnosed, we wrote a custom API that found HOME env var on all platforms irrespective of their OS (see this patch), by this API we were able to access the app-specific private directory and save state there. It was quite challenging, but we figured it out! Everything related to FFI layer, after this fix was quite easy. We eliminated the problems that existed in FFI layer via refactors and some modifications in functions and then, it built green! After fixing the FFI layer we wrote the CI for it that makes sure it builds each time a commit is pushed to any MR or branch and we can see the build status in pipelines too. Writing the CI for android-support crate was not a cakewalk,actually the application needs cross-compilation of our Rust library in order to function, so we need to make sure that the library which application is going to use on android devices is really compatible with android platform and by virtue we compile it on our PCs directly so that doesn’t work quite, to make expected behavior happen there are two options: * Compiling the Rust library codebase on android-device(less feasible), or * Cross-compiling the library on our PC/CI runner via providing support tools for android components So quite obviously we went with the second option, for this we installed rust and android compatible components in our runners during the CI runtime and then compiled the library via checking out to the correct directory. But since, for compiling Rust library in each CI run we had to install the components and this specific pre-compilation part(or better to say setup portion) consumed a considerable portion of our CI script(and made it look a bit daunting too), so we packaged these components to our custom docker image and pulled it each time in our CI runs, this made our life easy and scripts beautiful : )
NOTE: If you don’t have much idea of cross-compilation, then you can have a look at this awesome blog-post by Milan✨. It gives a clear understanding to the reader what cross-compilation is, irrespective of their previous knowledge on the same(yes, but basic knowledge on compilers is needed a bit). Spoiler alert: That someone in the opening of blog post is me 😛
Also, since the refactor was incomplete in our android application codebase and the android-support crate so between these to big tasks, I fitted this small refactoring, as a light break 😛 You can see the MRs for them here: * Fixing the FFI Layer: we/irdest/!31 * Refactoring the android-components: we/irdest/!32 * Adding the android-support crate in our CI Pipelines: we/irdest/!33
III. UI Improvements
After fixing issues in android application and our Rust library, and writing a robust end-to-end CI for them we moved forward towards improving the UI of the application. Previously, the application used legacy design components and ideology, under this task we modernized these UI components and followed the material design guidelines(material.io), that improved the overall look of our Authentication screens. There is nothing much to explain in it as it was really quite easy to achieve and also we didn’t encounter any problems. You can see the related MR here: we/irdest/!26
Acknowledgements
Well, by far it has been the most exciting summer for me and I had interesting experiences working on the project. Fixing components, was very difficult at the beginning due to many reasons one I would mention is the huge codebase which we have and it is not easy to learn about the functionality of each component present in it in short time, and also everything is intertwined too at many places. Going through it and fixing issues would definitely not have been possible without the immense support from my mentor, Spacekookie, who was always there to help me out and direct what to do. Their advice greatly helped in speeding up the development process and they are also a source of inspiration to me. Most importantly, Milan, who is not officially my mentor but has helped me a ton of times in technicalities of CI and setting up Nix environment(which I initially used for cross-compilation) about which I knew nothing, and many more instances. It won’t have been easy for me to accomplish aforementioned tasks without direction and help from Spacekookie & Milan. Thanks again to both of them : ) and I’m more excited to work on the project with them further!
Cheers Until next time we meet! ~Ayush Shrivastava
After having spent several weeks inquiring into the LibreMesh project, I have continued working with my mentors Santiago and Germán to think about some improvements for the Pirania plugin. For this reason, the main idea of this post is to expose the functionalities that we have thought about implementing to improve this Captive Portal for Community Networks.
Also, after having been chatting and reading about the needs that arise in the communities to adopt the use of the captive portal in the LimeApp, we defined that some of the functionalities to implement in the Pirania administration interface are:
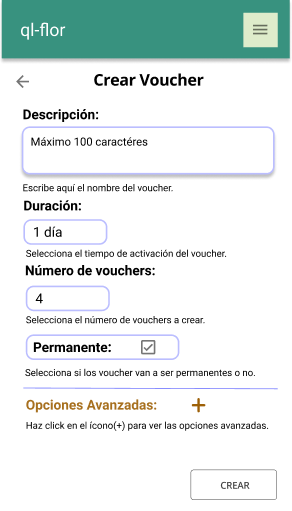
For the creation of vouchers:
– Description field, to identify who the voucher is for or what it is used for.
– Choice of the duration time since the voucher activation.
– Choice of voucher permanence, to establish whether a voucher can be used for “unlimited” time or not.
– Possibility to choose how many vouchers to create.
– Possibility to edit a voucher created to correct any typo in the description or to “delete” a voucher so that it can no longer be used.
– And set the possibility of choose some other advanced options such as setting an expiration date to activate the vouchers.
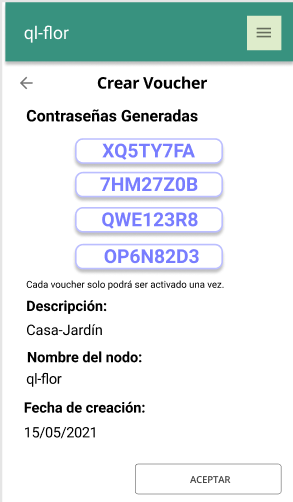
– At the end of the voucher creation, generate a metadata page to deliver the voucher passwords and other data of interest such as the description and the voucher creation date.
In the following images you can see some of the interfaces I have designed for this project:
Voucher creation screen.
Metadata creation screen.
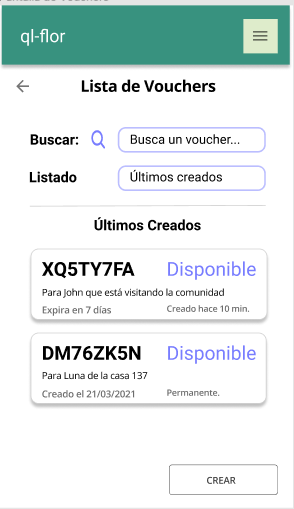
For Voucher Administration:
In a general administration page, to be able to have some functionalities such as:
– Establish a search field for vouchers.
– View the last vouchers created.
– View active vouchers.
– View vouchers that are in “Permanent” or “Not Permanent” status.
– View vouchers that were created from the current node.
An example for voucher administration:
Vouchers list interface.
These interfaces were designed in Figma, so they can be modified in the future and the final implementation.
The next challenge is to start writing the tests of the proposed interfaces in a Test Driven Development framework to later implement the functionalities in the LimeApp.
Welcome back!, This blog is for the first evaluation of the project.
Recap
In the prev section, we saw a viable way-out for the inconsistency of the generator tool for the latest version of the schema(2020-12) by mentioning some frameworks and also some targets.
Frameworks Review
I have tested the frameworks with the draft 7 version of the schema and I evaluated the framework by noting down the pros and cons of the results by each framework.
UI schema for react: This framework supports very advanced features of the schema, but has less UI integration. Also the framework supports the 2019-09 version of the schema but sadly UI schema cannot be segregated from our original JSON schema.
React JSON schema forms: This framework supports basic features of the schema and also has good UI customization, but has less integration of validation UI.
Restspace schema forms: This framework supports basic features of schema, but misses proper documentation.
JSONForms (eclipse source): This framework supports basic features of the schema and also has good UI customization with limited options.
A full document of the pros and cons of the frameworks can be found here.
Summary
By considering all the pros and cons of each framework, my mentor Andi and I have decided to work on with JSONForms (eclipse source).
Ongoing Status
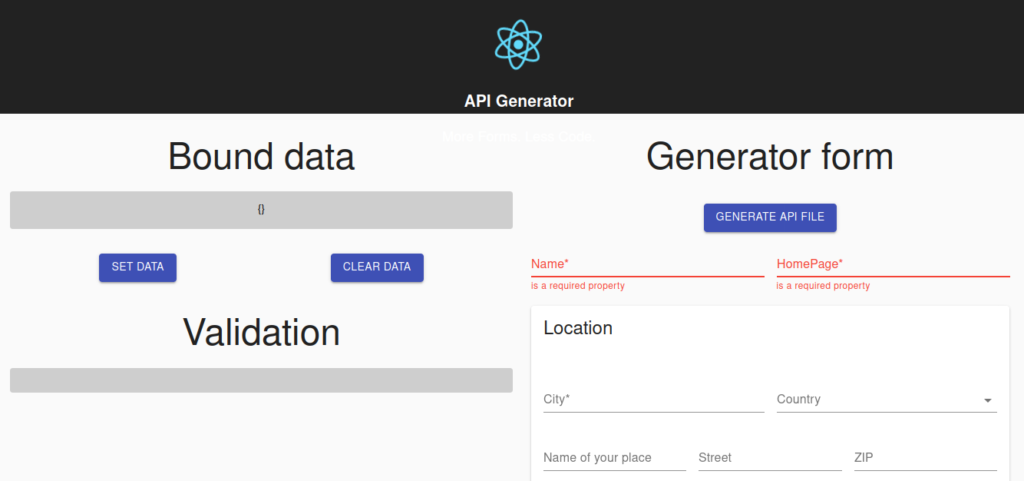
I rewrote the schema for the API generator tool to the draft 7 version of JSON schema also I have added formats to the schema. And generated the forms from the schema. I have been using React library (JSONForms) to generate the forms. Also, I developed the UI schema which is required to generate the form.
I have rendered the form, and also the bounded data of the form, which is the current data of the in the form and will be updated on change of the form data. Also, I have rendered the validations errors to show all the validation errors at one place before and after submission of the form.
Validation and Submission.
The JSONForms only emits errors through an event. So I have added a state to track the errors emitted by the event and on the event emit I recorded the errors into the state.
And for the submission of form we have to consider there are no recorded errors and the form data should not be empty because I have recorded errors into state only if the forms data is not empty. Errors are emitted by the event even before starting to fill the form. By validating all this checks, I have generated the output JSON file.
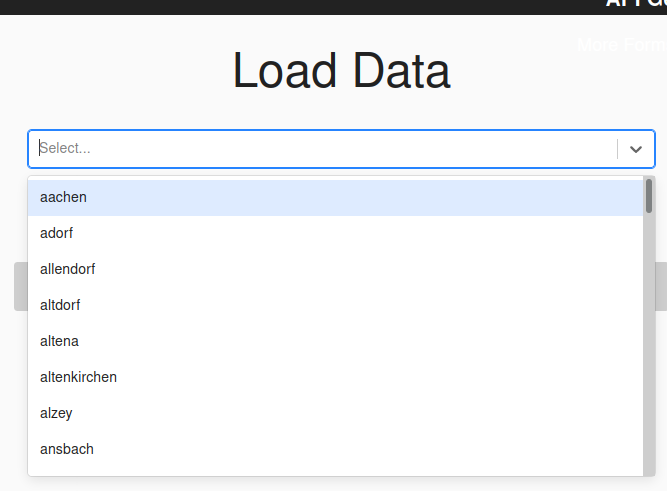
Loading data
For the testing purposes, I have added a button to load the weimarnetz API file data into the forms. I have fetched the ffSummarizedDir.json file from api.feifunk.net which consisted of all the communities API file data and rendered all the communities into a select field. So then I can add a on change event to load the data into the form.
References
A full document of the pros and cons of the frameworks can be found here.
Hello everyone, I am Ayush Shrivastava, one of the students selected for Google Summer of Code 2021 for Irdest sub-organization under the umbrella organization freifunk. If you’re wondering which topic/project the blog is focused on, then you may give it a look here!
Irdest
Well, if you don’t know, then let me first introduce what Irdest(irde.st) is and what it does/supports. So, Irdest is a software suite that allows users to create an internet-independent, decentralized, wireless, adhoc mesh network. It removes all the dependencies of the user from a specific single service and enables users to create a mesh of their own. In this network mesh, users can communicate to each other via messaging(both, individual and Room) and placing voice calls. Irdest network mesh service also allows users to share files between them without relying on the internet. And also when a user enters the Irdest mesh network(note that user needs not connected to the internet i.e., without having an IP address, it can be a P2P connection over Wi-Fi or Bluetooth), their IP address is completely hidden thereby maintaining privacy andreducing possible breaches that may occur. In the irdest network mesh, as soon as a user enters the network, they are assigned an ID, which is a unique cryptographic key that helps identifying the users. All the messages/calls/file transfers made in Irdest network mesh are completely end to end encrypted, again a positive sign from security & Privacy perspective. Currently, Irdest is supported for Linux & Android devices. For android, it is pretty much in incubation state and there are a bunch of points & directions where we can improve. This summer, I aim to implement some features on android client from the irdest upstream.
WARNING: This blog has a tons of mentions of FFI, you may get overwhelmed by the term, so it stands for Foreign Function Interface.
Current Progress & FFI Overview
So this was what Irdest is all about and a higher level overview of how things really work in it. As mentioned previously, the android client is pretty much in its incubation state, so we wish to implement it in a clean & modern way. So, since we want to make use of features supported by Irdest(in upstream) on the android application, therefore we need to maintain/create a binding or kind of a link between core Irdest code that makes all this internet independent network mesh possible & application codebase(to call those methods from). The point is that the core Irdest code that supports these functionalities is written natively in Rust, and we we want to utilize this pre-written library on android, without writing it again(in Kotlin)for android. So to make it possible, we’re going to write an FFI Layer(I’ll write in detail about FFI in some other post, but for the time being it is sufficient to know that by FFI we can call functions written in a specific language(mostly native languages like C++, C, Rust) from some other languages). This FFI layer currently exists in the module, but it is a bit old-fashioned, so in the initial phase of my coding period I plan and propose to rewrite this layer with best possible modern day FFI practices and following some standard references. The most crucial part of this project is this FFI layer, because it is the fundamental building block for the android project, once it is set and ready, then we’ll be able to use the functions and services provided in the native Irdest library written in Rust and extend our further development process via writing the application.
FFI Implementation – A Blueprint
The FFI already is quite notorious for the undefined behavior and on top of it, there is very less official documentation available on Rust-Kotlin FFI so this makes it more tricky & challenging to implement, but for the course of our development process, we’ll be following and taking inspiration from how Mozilla have implemented FFI integration between their existing rust library and their firefox android client. Another instance where they use Rust-Kotlin FFI is their Glean project(a telemetry service). I’ll be taking most of the inspiration by and practices being followed in Glean, as a result of which we’ll be writing FFI bindings on our own. After once we’ve written FFI layer, my next step will be to test it again thoroughly and make sure it works perfectly and does not has any bugs residing.
Further Development:
Once we have a robust FFI layer ready, then I’ll move to core android development process, that’ll entail writing UI for the application, architecting it properly, modularizing the application codebase and following the Modern Android Dev practices. Well this will be a relatively easier job to do in comparison to that of writing FFI layer xD My next step after this would be implementing the chat service in the application. We’ll focus in its detailing after we’re done with the very first milestone, the ”FFI Layer”. We’ll see the plan of action for chat service in a separate blogpost, after the first coding phase : )
Thanks for reading! Cheers, Until next time we meet!
This year, we were finally accepted back as an organization at the Google Summer of Code. In the meantime, the application and selection phase is over. Google has given us 9 project slots. We didn’t make the decision easy and chose the best ones out of the applications.
Organizations
Freifunk manages projects for different initiatives as an umbrella organization. In this Google Summer of Code we have Retroshare, irdest, OpenWrt, LibreMesh and freifunk itself on board.
Timeline
Currently we are in the community bonding period. During this time, all preparations are made so that the students can do their tasks. Also, they should dive into the communities and get to know people and tools.
Coding officially starts on June 7. All projects must be completed by August 23.
Our Google Summer of Code projects in 2021
Title
Organization
Student
OpenWRT PPA
OpenWrt
Neelaksh Singh
Irdest Android Client
irdest
Ayush Shrivastava
Android native app for network selection capability in LibreMesh routers
LibreMesh
Tomás Assenza
RetroShare WEBUI
RetroShare
Avinash
Freifunk Digital Twin – test on your virtual mesh before going productive
OpenWrt
pschreiber
OpenWrt Device Page
OpenWrt
Aditi-Singh
Freifunk Radio Ressource Management with IEEE 802.11v
OpenWrt
Valerius_B
Updation of the Json Schema to latest version (2020-12) along with the form generation and validation with the updated schema of the tools
freifunk
sh15h4nk
LibreMesh Pirania UI
LibreMesh
Angie Ortiz Giraldo
You can find more details for every projects on our GSoC dashboard.
Google Summer of Code is Google’s summer program for students to learn about, and get involved in open source. It’s happening again for the 17th year in 2021! Over 16,000 students from 111 countries have participated.
Motivate students to begin participating in open source development.
Help open source projects bring in new, excited developers into their communities who stay long after their GSoC ends.
Provide students in Computer Science and related fields the opportunity to do work related to their academic pursuits.
Give students exposure to real-world software development scenarios (e.g., testing, version control, software licensing, mailing-list etiquette, etc.).
Create more open source code.
How does GSoC work?
Programming online from their home, student participants spend 10 weeks on their projects (about 175 total hrs) earning stipends upon completion of their milestones. Volunteer mentors help students plan their time, answer questions and provide guidance on best practices, project-specific tools, and community norms while helping integrate students into their communities.
Students receive an invaluable learning experience, an introduction to the global FOSS community and something that potential employers love to see on resumes!
Mentoring orgs will gain new contributions & contributors along with recognition from Google and a higher profile for their project.
How to apply for freifunk @ GSoC 2021?
Pick an idea from our projects page and get in touch with mentors and the community.
Discuss your ideas and proposals.
Submit a draft of your proposal early, so we can give you feedback.
If you have any general questions, join our Matrix room.
Student applications are open March 29 – April 13, 2021.
Who can apply?
In short: you have to be at least 18 years when you register and you need to be enrolled in or accepted into a post-secondary academic program, including a college, university, masters program, PhD program, undergraduate program, licensed coding school. For all details, please see GSoC’s FAQ.